从第一性原理看机器人AI:为什么它比大模型更难?
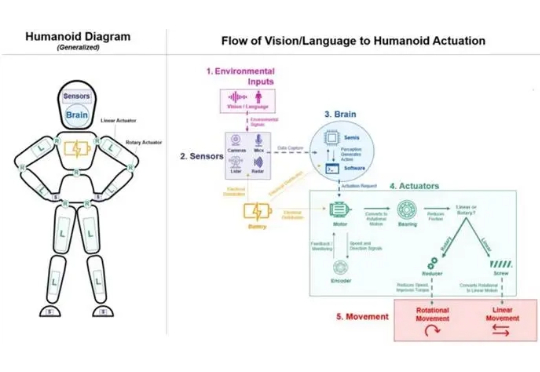
从第一性原理看机器人AI:为什么它比大模型更难?这篇来自 Interlatent(一家聚焦具身智能后训练与部署的早期创业公司) 的文章,试图从第一性原理出发,把现代 AI 机器人技术重新讲清楚:一个机器人到底如何理解世界,如何生成动作,又为什么会在数据、延迟和泛化上遇到如此多的困难。
来自主题: AI技术研报
7364 点击 2026-06-29 09:15
 搜索
搜索
这篇来自 Interlatent(一家聚焦具身智能后训练与部署的早期创业公司) 的文章,试图从第一性原理出发,把现代 AI 机器人技术重新讲清楚:一个机器人到底如何理解世界,如何生成动作,又为什么会在数据、延迟和泛化上遇到如此多的困难。

当 AI 教育从屏幕走向物理世界,松延动力正用小布米、课程体系和「学校—机构—家庭」生态闭环,把 K12 机器人教育变成具身智能走进千家万户的第一站。

开普勒机器人前 CEO 胡德波已开启具身智能赛道的第二次创业,新公司名为「索塔无界」。这一次,他选择了一条和开普勒不同的路。索塔无界将在今年夏天展示完整大脑能力,包括世界模型、多模态 VLA 以及 Physica-Claw 机器人操作系统,并在实验室跑通早期商业场景全流程。
当身披金甲的 H2 机器人,手持金箍棒,踩着由一群机器狗组成的「筋斗云」丝滑入场、当一堆宇树 G1 机器人大秀武术后,一大堆切片视频正在海外社交媒体疯传。

从手机、PC、汽车到机器人,我们需要怎样的端侧AI "芯" 思路? 作者 | 云鹏 编辑 | 漠影 机器人走猫步引爆行业、舞蹈功夫如人类般丝滑;AI手机一句话订外卖做报告、懂你所想知你所言;AI PC
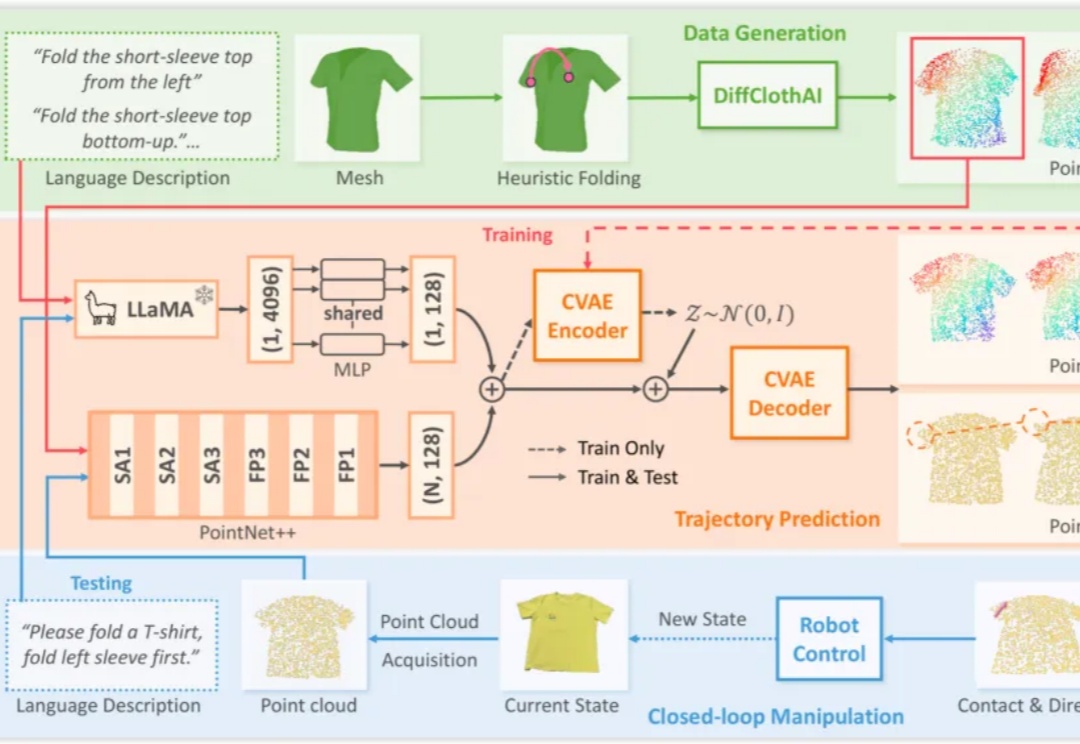
机器人对可形变物体的操作(Deformable Object Manipulation, DOM),是衡量通用机器人智能水平的关键指标之一。与刚体操作不同,衣物、绳索、食物等物体的形态不固定,其状态空间维度极高,且物理交互过程呈现出复杂的非线性动力学特性,为感知、规划和控制带来了巨大挑战。
2025 年 8 月的世界人形机器人运动会可说是笑点与技术齐飞,荒诞与精彩共舞。我们看到了撞翻人类和机器人的机器人运动员以及足球赛场上机器人接连倒地摔跤,也看到了最前沿机器人技术的集中展现以及一个又一个新纪录的诞生。
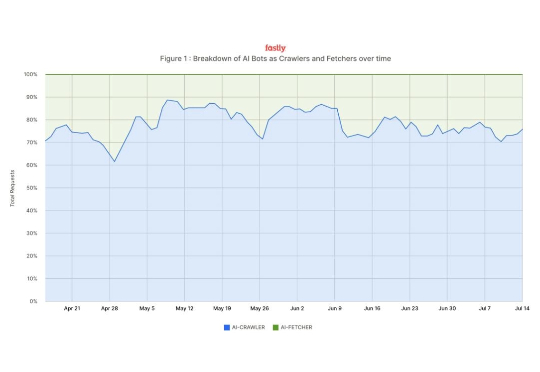
“我的网站被爬崩了,自己要付流量费,人家却用我的内容训练出 AI 模型,还赚足了眼球。” 自从 AI 机器人开始流行,很多网站开发者叫苦不堪。而近日,云服务巨头 Fastly 发布的一份报告让人看完直呼“现实往往我们仅听到的部分更为残酷。”

你是不是也有这种感觉——iPhone 虽然年年更新,但在 AI 时代,苹果好像慢了半拍?先别急,在苹果秋季发布会靠近时,苹果内部正在掀起另一套关乎 AI 的硬件革命。

最近,Tinder与OpenAI合作,推出了一款名为"Game Game"的AI语音调情游戏,号称能让用户在模拟约会场景中练习调情技巧。用户可以通过与 AI 机器人互动,练习调情、模拟初次相遇场景,并根据表现获得评分和建议。